10 REM Pi_bi_step
20 REM Control a bi-polar stepping motor wit the Raspberry Pi
30 REM Jochen Lueg
40 REM http://roevalley.com (bottom of the page)
50 REM Limavady, January 2013
60 REM Version 1.0
70
80 ON ERROR PROCerror
90 PROCinit
100 OFF
110 OSCLI"RMEnsure GPIO 0.00 RMLoad GPIO"
120 OSCLI"RMensure GPIO 0.40 ERROR Please install the GPIO module"
130 PROCsetupGPIO
140
150
160 PRINT
170 PRINT " Motor controls"
180 PRINT
190 PRINT " Left . . . . . . Z"
200 PRINT " Right . . . . . . C"
210 PRINT " Stop . . . . . . X"
211 PRINT
220 PRINT " Full step . . . . . . F"
230 PRINT " Half step . . . . . . H"
240 PRINT
250 PRINT " Fastest . . . . . . 1"
260 PRINT " to"
270 PRINT " Slowest . . . . . . 9"
280 PRINT
290 PRINT " Press 'Q' to leave the program"
300
310 REPEAT
320 Key$=INKEY$(0) : REPEAT UNTIL INKEY(0)=-1
330 IF Key$="c" OR Key$="C" Direction$="Right"
340 IF Key$="z" OR Key$="Z" Direction$="Left"
350 IF Key$="q" OR Key$="Q" Direction$="Finished"
360 IF Key$="x" OR Key$="X" Direction$="Stop"
370 IF Key$="h" OR Key$="H" Mode$="Half"
380 IF Key$="f" OR Key$="F" Mode$="Full"
390 IF Key$="1" T%=150*S% :Speed$="Fast"
400 IF Key$="2" T%=200*S% :Speed$="Fast-1"
410 IF Key$="3" T%=300*S% :Speed$="Fast-2"
420 IF Key$="4" T%=625*S% :Speed$="Fast-3"
430 IF Key$="5" T%=1250*S% :Speed$="Half"
440 IF Key$="6" T%=2500*S% :Speed$="Slow+3"
450 IF Key$="7" T%=5000*S% :Speed$="Slow+2"
460 IF Key$="8" T%=10000*S% :Speed$="Slow+1"
470 IF Key$="9" T%=20000*S% :Speed$="Slow"
480 IF Direction$="Right" AND Mode$="Full" THEN PROCfull_step_right
490 IF Direction$="Right" AND Mode$="Half" THEN PROChalf_step_right
500 IF Direction$="Left" AND Mode$="Full" THEN PROCfull_step_left
510 IF Direction$="Left" AND Mode$="Half" THEN PROChalf_step_left
520 IF Direction$="Stop" PRINTTAB(1,19)"Motor
stopped
"
530 IF Direction$="Stop" PROCall_off: Direction$="Wait"
540 IF Direction$ <> "Wait"
PRINTTAB(1,19);Mode$;" step. Turning ";Direction$;" with speed
";Speed$;" "
550 UNTIL Direction$="Finished"
560 PROCclose
570 QUIT
580
590 DEFPROCall_off
600 FOR J%=1 TO 4
610 SYS"GPIO_WriteData",Port%(J%),0
620 NEXT
630 ENDPROC
640
650
660 DEFPROCfull_step_right
670 FOR J%=4 TO 1 STEP-1
680 SYS"GPIO_WriteData",Port%(J%),1
690 SYS"GPIO_WriteData",Port%(J%-1),0: FOR I%=1TO T%:NEXT
700 NEXT
710 ENDPROC
720
730
740 DEFPROCfull_step_left
750 FOR J%=1 TO 4
760 SYS"GPIO_WriteData",Port%(J%),1
770 SYS"GPIO_WriteData",Port%(J%-1),0: FOR I%=1TO T%:NEXT
780 NEXT
800 ENDPROC
810
820
830 DEFPROChalf_step_right
840 FOR J%=4 TO 1 STEP-1
850 SYS"GPIO_WriteData",Port%(J%),1
860 SYS"GPIO_WriteData",Port%(J%-1),0: FOR I%=1TO T%:NEXT
870 SYS"GPIO_WriteData",Port%(J%+1),1: FOR I%=1TO T%:NEXT
880 NEXT
900 ENDPROC
910
920
930 DEFPROChalf_step_left
940 FOR J%=1 TO 4
950 SYS"GPIO_WriteData",Port%(J%),1
960 SYS"GPIO_WriteData",Port%(J%-1),0: FOR I%=1TO T%:NEXT
970 SYS"GPIO_WriteData",Port%(J%+1),1: FOR I%=1TO T%:NEXT
980 NEXT
1010 ENDPROC
1020
1030
1040 DEFPROCinit
1050 W%=0
1060 Direction$="Stop"
1070 S%=200
1080 T%=S%*150
1090 Speed$="Fast"
1100 Mode$="Full"
1140 ENDPROC
1150
1160
1170 DEFPROCerror
1180 PRINT REPORT$;" at line ";ERL :
1190 FOR J%=1 TO 4
1200 SYS"GPIO_WriteData",Port%(J%),0
1210 NEXT
1230 END
1240 ENDPROC
1250
1251
1260 DEFPROCsetupGPIO
1270 DIM Port%(5) : Port%()=15,24,23,18,15,24
1280 SYS"GPIO_EnableI2C",0
1290 SYS"GPIO_ExpAsGPIO",2
1300 FOR J%=1 TO 4
1310 SYS"GPIO_WriteMode",Port%(J%),1
1320 NEXT
1340 ENDPROC
1350
|
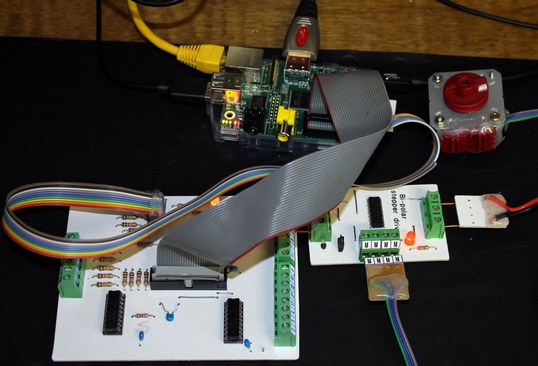 Bi-polar stepping motors use only two coils and are easily recognized
because they only have four wires. Most unipolar steppers can be used in
bipolar mode by ignoring the two centre taps. Because bi-polar stepping
motors produce the rotating magnetic field by reversing the current in
both coils, controlling them is much more complicated than controlling
their unipolar
cousins.
Bi-polar stepping motors use only two coils and are easily recognized
because they only have four wires. Most unipolar steppers can be used in
bipolar mode by ignoring the two centre taps. Because bi-polar stepping
motors produce the rotating magnetic field by reversing the current in
both coils, controlling them is much more complicated than controlling
their unipolar
cousins.