
Double DC motor control using pulse width modulation
|
| |
|
Below is a zip archive with the BBC BASIC for Windows program file and the executable of the same program, in case you don't have BB4WK8055_Dual-pwm.zipand here is a link to a video of the projectVideo link |
| 10 REM K8055_Two-PWM 20 REM Control two motors using PWM and the Velleman K8055 USB board 30 REM Version 1.0 40 REM Jochen Lueg 50 REM http://roevalley.com 60 REM February 2012 70 80 PROCK8055_init 90 SYS K8055_CloseDevice%,0 100 SYS K8055_OpenDevice%, 0 110 120 ON ERROR PROCerror 130 140 PROCscreen(380,300) 150 OFF 160 PROCinit 170 SYS K8055_OutputAnalogChannel%,1,255 180 SYS K8055_OutputAnalogChannel%,2,255 190 200 PRINT 210 PRINT " Motor 1" 220 PRINT " Left - Stop - Right . . . . . A - S - D" 230 PRINT " Slower - Faster . . . . . . . K - L" 240 PRINT 250 PRINT " Motor 2" 260 PRINT " Left - Stop - Right . . . . . Z - X - C" 270 PRINT " Slower - Faster . . . . . . . < - >" 280 PRINT 290 PRINT " Leave the program . . . . . . Q" 300 310 REPEAT 320 Key$=INKEY$(0) 330 340 REPEAT UNTIL INKEY(0)=-1 350 IF (Key$="a" OR Key$="A") AND (M1_Direction$="M1_Right" OR M1_State$="M1_Stopped") PROCM1_left 360 IF (Key$="s" OR Key$="S") AND M1_State$="M1_Running" PROCM1_stop 370 IF (Key$="d" OR Key$="D") AND (M1_Direction$="M1_Left" OR M1_State$="M1_Stopped") PROCM1_right 380 390 IF (Key$="z" OR Key$="Z") AND (M2_Direction$="M2_Right" OR M2_State$="M2_Stopped") PROCM2_left 400 IF (Key$="x" OR Key$="X") AND M2_State$="M2_Running" PROCM2_stop 410 IF (Key$="c" OR Key$="C") AND (M2_Direction$="M2_Left" OR M2_State$="M2_Stopped") PROCM2_right 420 430 IF Key$="k" OR Key$="K" THEN 440 M1_RunningSpeed%+=1 450 IF M1_RunningSpeed%>255 M1_RunningSpeed%=255 460 SYS K8055_OutputAnalogChannel%,1,M1_RunningSpeed% 470 M1_StartSpeed%=M1_RunningSpeed% 480 REPEAT UNTIL INKEY(0)=-1 490 ENDIF 500 IF Key$="l" OR Key$="L" THEN 510 M1_RunningSpeed%-=1 520 IF M1_RunningSpeed%<0 M1_RunningSpeed%=0 530 SYS K8055_OutputAnalogChannel%,1,M1_RunningSpeed% 540 M1_StartSpeed%=M1_RunningSpeed% 550 REPEAT UNTIL INKEY(0)=-1 560 ENDIF 570 580 IF Key$="," OR Key$="<" THEN 590 M2_RunningSpeed%+=1 600 IF M2_RunningSpeed%>255 M2_RunningSpeed%=255 610 SYS K8055_OutputAnalogChannel%,2,M2_RunningSpeed% 620 M2_StartSpeed%=M2_RunningSpeed% 630 REPEAT UNTIL INKEY(0)=-1 640 ENDIF 650 IF Key$="." OR Key$=">" THEN 660 M2_RunningSpeed%-=1 670 IF M2_RunningSpeed%<0 M2_RunningSpeed%=0 680 SYS K8055_OutputAnalogChannel%,2,M2_RunningSpeed% 690 M2_StartSpeed%=M2_RunningSpeed% 700 REPEAT UNTIL INKEY(0)=-1 710 ENDIF 720 PROCfeedback(M1_RunningSpeed%,M2_RunningSpeed%) 730 740 750 UNTIL Key$="q" OR Key$="Q" 760 770 PROCM1_stop:PROCM2_stop 780 SYS K8055_ClearAllDigital% 790 SYS K8055_OutputAnalogChannel%,1,255 800 SYS K8055_OutputAnalogChannel%,2,255 810 SYS K8055_CloseDevice% 820 SYS "FreeLibrary",K8055_Board% 830 *QUIT 840 END 850 860 870 880 DEFPROCfeedback(Speed1%,Speed2%) 890 LOCAL S% 900 COLOUR 6 910 S1%=(255-Speed1%)/2.55 920 S2%=(255-Speed2%)/2.55 930 940 PRINTTAB(2,13)M1_State$;" ";M1_Direction$;" Speed: ";S1%;" " 950 PRINTTAB(2,14)M2_State$;" ";M2_Direction$;" Speed: ";S2%;" " 960 ENDPROC 970 980 990 DEFPROCM1_right 1000 PROCM1_stop 1010 SYS K8055_SetDigitalChannel%,8 1020 PROCM1_start 1030 M1_Direction$="M1_Right" 1040 ENDPROC 1050 1060 1070 DEFPROCM1_left 1080 PROCM1_stop 1090 SYS K8055_ClearDigitalChannel%,8 1100 PROCM1_start 1110 M1_Direction$="M1_Left" 1120 ENDPROC 1130 1140 1150 DEFPROCM1_start 1160 FOR J%= 255 TO M1_StartSpeed% STEP-4 1170 SYS K8055_OutputAnalogChannel%,1,J% 1180 PROCfeedback(J%,M2_RunningSpeed%) 1190 NEXT 1200 M1_RunningSpeed%=M1_StartSpeed% 1210 M1_State$="M1_Running" 1220 ENDPROC 1230 1240 | 1250 DEFPROCM1_stop 1260 FOR J%= M1_RunningSpeed% TO 255 STEP 4 1270 SYS K8055_OutputAnalogChannel%,1,J% 1280 PROCfeedback(J%,M2_RunningSpeed%) 1290 NEXT 1300 M1_State$="M1_Stopped" 1310 M1_RunningSpeed%=255 1320 ENDPROC 1330 1340 DEFPROCM2_start 1350 FOR J%= 255 TO M1_StartSpeed% STEP-4 1360 SYS K8055_OutputAnalogChannel%,2,J% 1370 PROCfeedback(M1_RunningSpeed%,J%) 1380 NEXT 1390 M2_RunningSpeed%=M2_StartSpeed% 1400 M2_State$="M2_Running" 1410 ENDPROC 1420 1430 1440 DEFPROCM2_stop 1450 FOR J%= M2_RunningSpeed% TO 255 STEP 4 1460 SYS K8055_OutputAnalogChannel%,2,J% 1470 PROCfeedback(M2_RunningSpeed%,J%) 1480 NEXT 1490 M2_State$="M2_Stopped" 1500 M2_RunningSpeed%=255 1510 ENDPROC 1520 1530 1540 DEFPROCM1_right 1550 PROCM1_stop 1560 SYS K8055_SetDigitalChannel%,8 1570 PROCM1_start 1580 M1_Direction$="M1_Right" 1590 ENDPROC 1600 1610 1620 DEFPROCM1_left 1630 PROCM1_stop 1640 SYS K8055_ClearDigitalChannel%,8 1650 PROCM1_start 1660 M1_Direction$="M1_Left" 1670 ENDPROC 1680 1690 1700 1710 DEFPROCM2_right 1720 PROCM2_stop 1730 SYS K8055_SetDigitalChannel%,7 1740 PROCM2_start 1750 M2_Direction$="M2_Right" 1760 ENDPROC 1770 1780 1790 DEFPROCM2_left 1800 PROCM2_stop 1810 SYS K8055_ClearDigitalChannel%,7 1820 PROCM2_start 1830 M2_Direction$="M2_Left" 1840 ENDPROC 1850 1860 1870 DEFPROCinit 1880 M1_RunningSpeed%=255 1890 M1_StartSpeed%=100 1900 M2_RunningSpeed%=255 1910 M2_StartSpeed%=100 1920 1930 M1_Direction$="M1_Left" 1940 M1_State$="M1_Stopped" 1950 M2_Direction$="M2_Left" 1960 M2_State$="M2_Stopped" 1970 ENDPROC 1980 1990 2000 DEFPROCscreen(ScreenWidth%,ScreenHeight%) 2010 COLOUR 128 2020 CLS 2030 COLOUR 15 2040 SYS "SetWindowPos",@hwnd%,-1,0,0,ScreenWidth%,ScreenHeight%,0 2050 VDU 26 2060 ENDPROC 2070 2080 2090 DEFPROCerror 2100 PRINT REPORT$;" at line ";ERL : 2110 SYS K8055_ClearAllDigital%,1 2120 SYS K8055_ClearAllAnalog%,1 2130 SYS K8055_CloseDevice%,1 2140 SYS "FreeLibrary",K8055_Board% 2150 END 2160 ENDPROC 2170 2180 2190 DEFPROCK8055_init 2200 REM These are all the system calls in the order found in the manual 2210 SYS"LoadLibrary","K8055D.dll" TO K8055_Board% 2220 SYS"GetProcAddress",K8055_Board%,"OpenDevice" TO K8055_OpenDevice% 2230 SYS"GetProcAddress",K8055_Board%,"CloseDevice" TO K8055_CloseDevice% 2240 SYS"GetProcAddress",K8055_Board%,"ReadAnalogChannel" TO K8055_ReadAnalogChannel% 2250 SYS"GetProcAddress",K8055_Board%,"ReadAllAnalog" TO K8055_ReadAllAnalog% 2260 SYS"GetProcAddress",K8055_Board%,"OutputAnalogChannel" TO K8055_OutputAnalogChannel% 2270 SYS"GetProcAddress",K8055_Board%,"OutputAllAnalog" TO K8055_OutputAllAnalog% 2280 SYS"GetProcAddress",K8055_Board%,"ClearAnalogChannel" TO K8055_ClearAnalogChannel% 2290 SYS"GetProcAddress",K8055_Board%,"ClearAllAnalog" TO K8055_ClearAllAnalog% 2300 SYS"GetProcAddress",K8055_Board%,"SetAnalogChannel" TO K8055_SetAnalogChannel% 2310 SYS"GetProcAddress",K8055_Board%,"SetAllAnalog" TO K8055_SetAllAnalog% 2320 SYS"GetProcAddress",K8055_Board%,"WriteAllDigital" TO K8055_WriteAllDigital% 2330 SYS"GetProcAddress",K8055_Board%,"ClearDigitalChannel" TO K8055_ClearDigitalChannel% 2340 SYS"GetProcAddress",K8055_Board%,"ClearAllDigital" TO K8055_ClearAllDigital% 2350 SYS"GetProcAddress",K8055_Board%,"SetDigitalChannel" TO K8055_SetDigitalChannel% 2360 SYS"GetProcAddress",K8055_Board%,"SetAllDigital" TO K8055_SetAllDigital% 2370 SYS"GetProcAddress",K8055_Board%,"ReadDigitalChannel" TO K8055_ReadDigitalChannel% 2380 SYS"GetProcAddress",K8055_Board%,"ReadAllDigital" TO K8055_ReadAllDigital% 2390 SYS"GetProcAddress",K8055_Board%,"ResetCounter" TO K8055_ResetCounter% 2400 SYS"GetProcAddress",K8055_Board%,"ReadCounter" TO K8055_ReadCounter% 2410 SYS"GetProcAddress",K8055_Board%,"SedtCounterDebouceTime" TO K8055_SetCounterDebounceTime% 2420 ENDPROC |
Return
to the interfacing index
|
 The
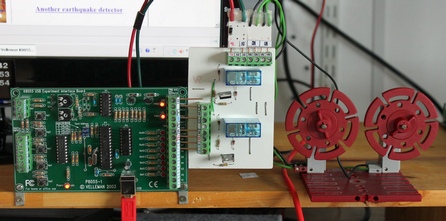
circuit board and motors are shown on the right, connected to the K8055.
The motors. Two large red round thingies are connected to the axles to make the things more visible.
The
circuit board and motors are shown on the right, connected to the K8055.
The motors. Two large red round thingies are connected to the axles to make the things more visible.