A dual motor controller
I often use my Fischertechnik kits and generally my models employ one or two small DC motors and a few switches. This project will control two DC motors.

The motors can be turned on and off individually as well as change direction. This requires four of the experiment board control lines. The relays I picked for this happened to be in my junk box and can carry up to 10A. As there seem to be as many different relays as there are fingerprints, you will have to change my PCB layout to suit your own requirements.
For the motor M1 to turn in one direction, the relay
RL 1 has
to be activated. If you want to change the direction of that motor,
relays RL 1 and RL 2 have to be both turned on. To stop the motor,
relay
RL 1 has to be turned off. The same applies to motor M2 but with the
relays LL 2 and RL 4 instead . Notice that with this particular circuit
the motors and the relays have to have the same voltage. It is of
course an easy matter to separate the power supply so that there is one
voltage for the relay coils and a different voltage for the motors.
 On
the right is a suggested printed circuit board layout. Remember what
I said above about the different pin out for relays - it is unlikely
that your own stuff looks the same as mine. You'll need to adapt the
layout to your needs. Remember also that you need two double pole
double throw relays as well as two double pole single throw ones.
On
the right is a suggested printed circuit board layout. Remember what
I said above about the different pin out for relays - it is unlikely
that your own stuff looks the same as mine. You'll need to adapt the
layout to your needs. Remember also that you need two double pole
double throw relays as well as two double pole single throw ones.
Unfortunately I can't supply the file for the drawing as I do all my
artwork on an Acorn computer - which is not compatible with a PC or a
Mac but it is a 1:1 gif file and could be used as a negative.
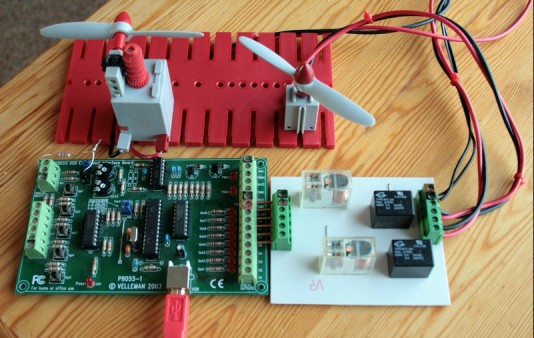
On the left is a photograph of the complete system.
The relay board is connected to the Velleman board via the connector
strip on the left of the board. The connector strip on the right is for
the two motors and the power supply.
Controlled by the the small program below, the set-up performed very
well. The Velleman board has a slow response time, but this matters
little in a simple application like this.
Here is the archive with the BBC BASIC for Windows program file and the exec file
K8055_2motors.zip
There is also a YouTube video of the project
Below is the same thing for the K8061 interface board
K8061_2motors.zip
